IRC INTERNATIONALS
SENIOR LEVEL PROBLEM STATEMENT [PROVISIONAL]

Problem Statement
To build a pair of autonomous robots that will perform the task of transporting different types of waste to their respective dumping areas.
Real World Inspiration
Different types of waste must be processed and treated differently. Proper segregation and transportation of waste must be maintained in order to ensure proper management of waste.
Actual Task Description
Robots are tasked to follow the track, collect the different coloured props and transport them to their respective processing zones.
Bot Information
| Name of the bot | Start Area | Maximum Size | Task |
|---|---|---|---|
| Bot 1 - < Name of Bot > | Start Area No. 1 | Length: 9.5 Inches Width: 9.5 Inches Height: No limit | The Bot 1 needs to collect the waste from different areas and pass it over to the Bot 2 which will place the waste in the dumping area. |
| Bot 2 - < Name of Bot > | Start Area No. 2 | Length: 9.5 Inches Width: 9.5 Inches Height: No limit | The Bot 2 needs to collect the waste from different areas and pass it over to the Bot 1 which will place the waste in the dumping area. |
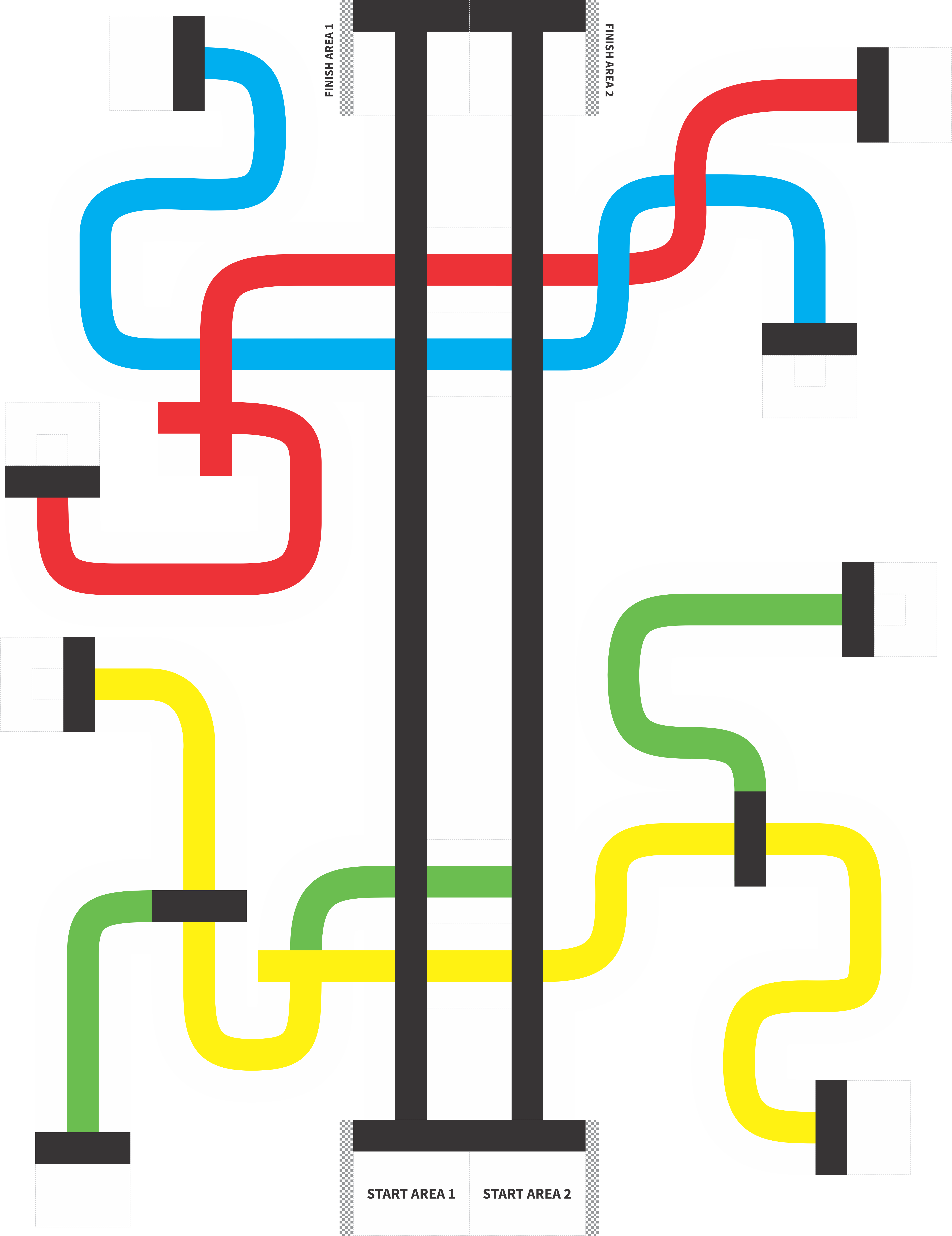
Arena Information
Start areas
Start area 1 is the Start area for the first bot and Start area 2 is the start area for the second runner bot. And from where robots need to start the run
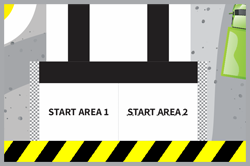
Start Areas
Pickup zone
Pickup zones are the areas from where the bots need to collect the props.

Pickup Zone 1

Pickup Zone 2

Pickup Zone 3

Pickup Zone 4
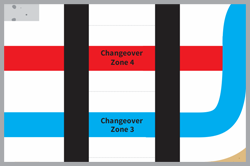
Changeover Zone
Changeover Zones are the areas where Bots need to exchange the props with one another.
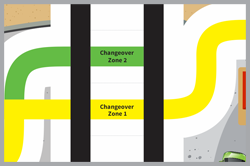
Changeover Zone 1
Changeover Zone 2
Track
The Track is the area on which bots need to move and carry the props from one zone to another.
Track
Processing Zones
Processing zones are the areas where the bots need to finally place the props.
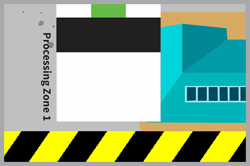
Processing Zone 1

Processing Zone 2
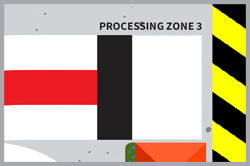
Processing Zone 3
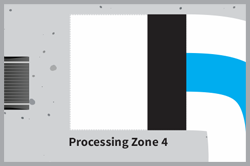
Processing Zone 4
Finish area
Finish area 1 is the finish area for the first runner bot and finish area 2 is the finish area for the second runner bot and where robots need to rest at the end of the run.

Finish Area
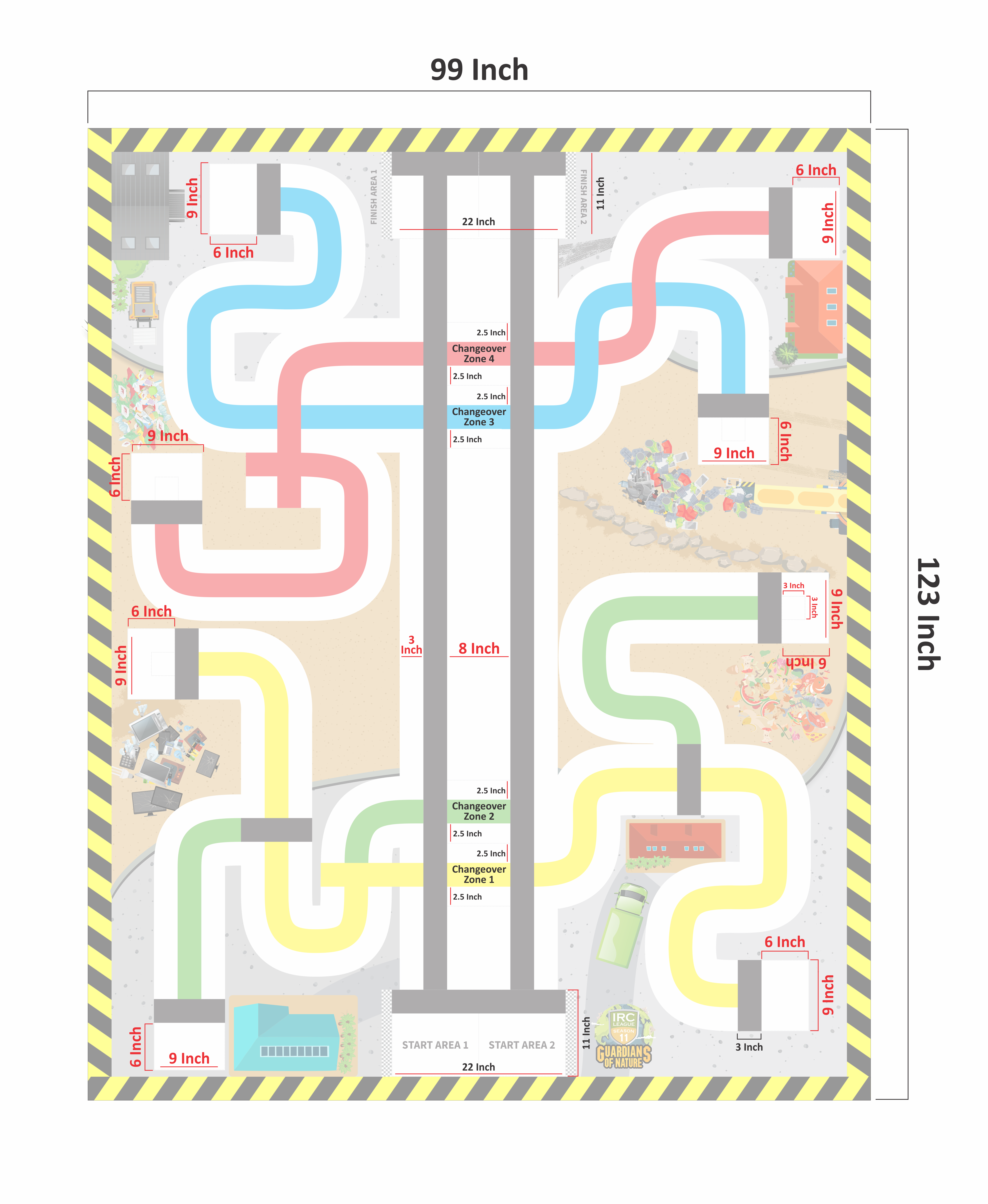
Arena
| Arena Length : | 123 Inches(Including Boundary) | 117 Inches(Working Area) |
| Arena Width : | 99 Inches(Including Boundary) | 93 Inches(Working Area) |
| Arena Boundary : | Height - 6 Inches | Height - 6 Inches |
Working Area need to be kept in mind while designing the bots. Bot should never attempt to cross working area. A boundary may be kept along the border (out of working area) and this boundary position and orientation may differ from Arena to Arena and time to time. It shouldn't matter to bots being designed by keeping working area in mind.
Arena Details

Prop Details
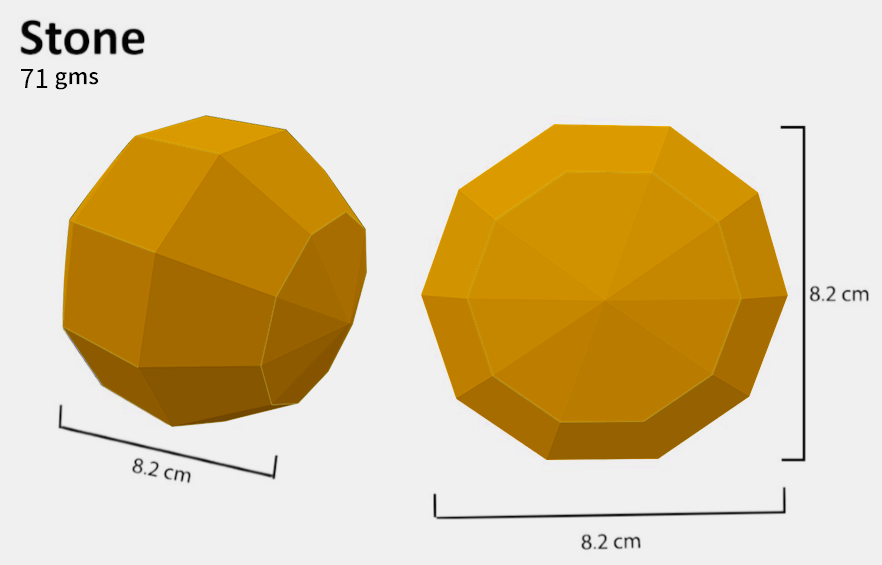
Props Description
| Prop name | Colors | 3-D Printing Details |
|---|---|---|
| Cubes | Black, Blue, Purple & Golden | Layer Height: 0.3mm Shell Thickness: 1.2mm Infill type: Hexagon Infill Density: 8% Print Speed: 60mm/s 3-D File: STL GX GCODE |
Arena Tasks
Tasks of Bot 1:
- Start Position: Start Area 1
- Bot 1 needs to collect the prop from the Pickup zone 1 and place it inside the changeover zone 1/changeover zone 2.
- Bot 1 will then have to collect the prop (placed by bot 2) from changeover zone 1 or changeover zone 2 and place it at processing zone 1
- Bot 1 will then collect the prop from the Pickup zone 4 and place it inside the changeover zone 3/changeover zone 4.
- Bot 1 will then collect the prop (placed by bot 2) from the changeover zone 3 or changeover zone 4 and place it at processing zone 4
- End Position: Finish Area 1
Tasks of Bot 2:
- Start Position : Start Area 2
- Bot 2 needs to collect the prop from the Pickup zone 2 and place it inside the changeover zone 1/changeover zone 2
- Bot 2 will then collect the prop (placed by bot 1) from the changeover zone 1 or changeover zone 2 and place it at processing zone 2
- Bot 2 will then collect the prop from the Pickup zone 3 and place it inside the changeover zone 3/changeover zone 4.
- Bot 2 will then collect the prop (placed by bot 1) from the changeover zone 4 or zone 3 and place it at processing zone 3.
- End Position: Finish Area 2
DEVIATIONS: Both the bots must not deviate from the line. Doing so will be counted as a deviation.
NOTE: The tasks explained above can be followed in any possible sequence.
Important Points to adhere to during the run
- It is the responsibility of the team to make sure they call DONE when the structure is ready and well within the designated areas.
- "Calling out DONE" doesn't necessarily mean to call out the word done, it means that the team should indicate to the referee in any way that the team is done with the run and would want to get the scores.
- In any situation of Deviation, both the robots and prop will be kept to their start positions and team needs to start the robots again from the Start Areas.However the gained scores will be counted.
- Scores awarded once for any particular task cannot be gained again.
- Bonus points will be awarded only when all the tasks of the run are completed fully. This also means that the second run will not be provided.
Scoring
Type of Scoring - Mid match / End of match
| Task description | Score for each prop | Total Score |
|---|---|---|
| Successfully able to collect the prop from its designated location( collection area) Scoring Method: Mid of Match |
25 | 100 |
| Successfully able to place prop at Changeover zone by the Bots (Points will be awarded at each Changeover zone ) Scoring Method: Mid of Match |
75 | 300 |
| Successfully able to pick prop from Changeover zone by Bots (Points will be awarded at each Changeover zone ) Scoring Method: Mid of Match |
100 | 400 |
| Successfully able to place the props at their respective processing zones Scoring Method: End of Match |
50 | 200 |
The Scoring Methods
There are two ways scoring can happen for a run:
- END-OF-MATCH SCORING -Most of your score depends on the conditions/design of props/arena exactly at the end of the match. Following are important reference points for this kind of scoring:
- The arena/props are the evidence of most of your score. When the run ends, PLEASE DON’T TOUCH ANYTHING! The referee first needs time to record the condition of the arena on a score sheet and come to an agreement with you (students only) about what points were scored or missed and why.
- Points aren’t given for results the robot produces during the match but then disturbs before the end. For example, you might have kept a prop at a designated location during the run, but in a bid to complete other tasks, if that prop is disturbed and stays in that situation at the end of the match, no scores will be rewarded.
- If a team agrees with the score, the team’s leader needs to sign the sheet, and the score is final.
- If you don’t agree, tell the referee nicely. Referees can be wrong, and when they are, they want to know.
- If still there is a conflict, you need to tell the referee then follow the Conflict Raising process.
- After a short discussion, if the referee is not sure about the score, the Chief Referee will make the final decision.
- MID-MATCH SCORING - If a team’s score is permanently determined during the match, instead of at the end.
- EXAMPLE: When a mission is required to be achieved through a specific method but is achieved by some other method, it is marked scoreless. Please don’t try to show the video to the referees.
- EXAMPLE: If the robot puts Model A into a scoring condition by destroying Model B, the Model B mission is marked scoreless and vice versa.
- EXAMPLE: If the robot is required to drive over something in the middle of the match, the referee will mark the score for that when it happens, since no lingering evidence will be visible.
Bonus Score
If a team is able to finish all the tasks before time (100% of a run), a score of 5 points will be added with every 5 seconds of the time left. For example: From the total time of 4 minutes, if the task was completed at 3 minutes 30 seconds mark, so 30 points will be added to the final score. If the task was completed at 3 minutes 34 seconds so 25 points will be added to the final score.
Conflict Process
- If a team agrees with the score, the team’s leader needs to sign the sheet, and the score is final.
- If you don’t agree, tell the referee nicely. Referees can be wrong and when they are, they want to know.
- If still there is a conflict, you need to tell the referee and then follow the Conflict Raising process.
- In such situation, the case will be referred to Chief Referee. The chief Referee’s decision would be final and binding.
- After a short discussion, if the referee is not sure about the score, the Chief Referee will make the final decision.
Senior Level Rules and Regulations
- The duration of the run will be 4 minutes and there won't be any trial time provided for the run on the event day.
- Deviation: Both the bots must not deviate from the line. Doing so will be counted as a deviation.
- If a robot deviates from the line, the deviated robot will be kept at the respective Start Area. The team needs to decide if they want to keep another robot also at that start point. Even if both robots are kept at Start areas it will be marked as 1 deviation.
- A total of 3 deviations (4 runs) are allowed during the whole arena run of 4 minutes. Remember this count (4) is for both the bots. In such a situation, the run needs to start again and the referee would bring the deviated bot to its respective start area.
- No time will be paused in case the robot deviates from its path.
- Only Avishkaar kits are allowed to build these Robots.
- A power source of 7.4 Volts and 2200 MAH current is allowed in the bots.
- Participants can touch the robots only when they are in the Start Areas and nowhere else. They can repair the robots only in Start Area in case of damage (runtime will not be paused).
- If any of the robots go out of the arena, the referee would bring it back to the respective Start Area and the arena props (if they were attached to the robot in some manner) to their respective start locations and no points would be awarded for them. This is marked as deviation and The DEVIATION RULE as defined above will apply.
- If a team is able to finish all its tasks before time, all the props will be refurbished on the arena and the team can start scoring points again. The timer would stop when the refurbishing is taking place.
- During the Arena run if by any means the Arena/Props got damaged then the referee can disqualify the team.
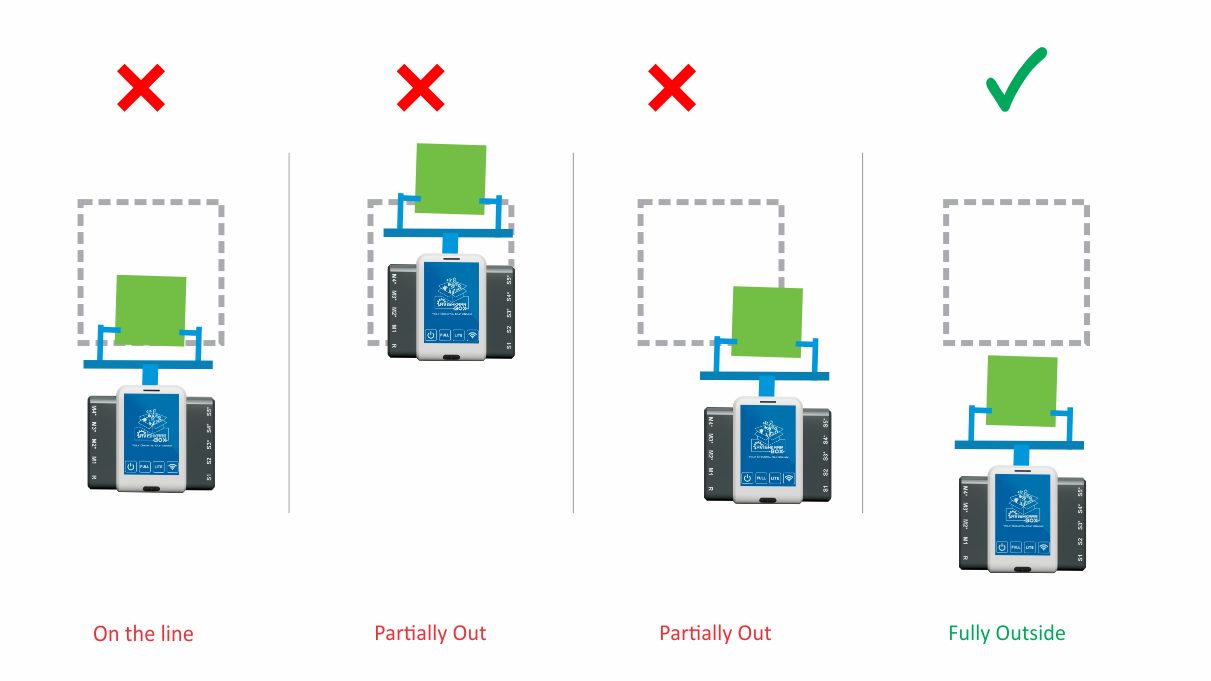
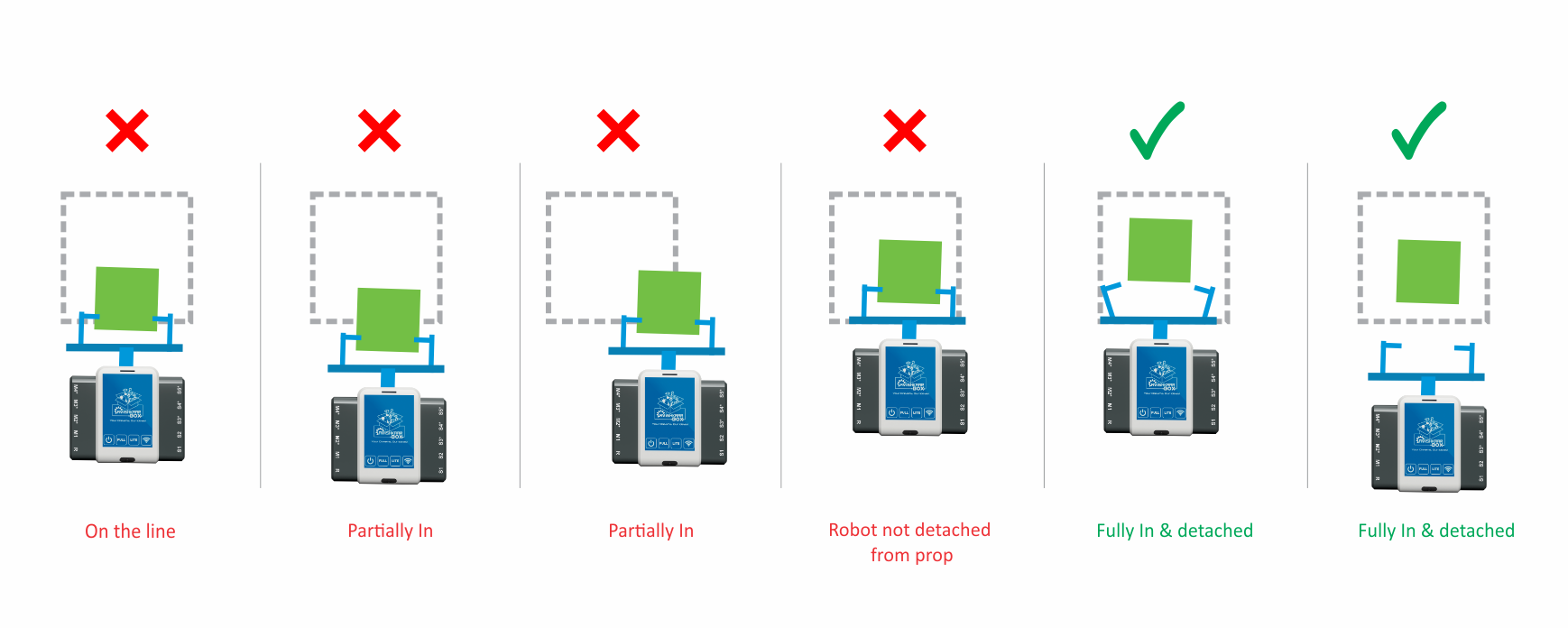
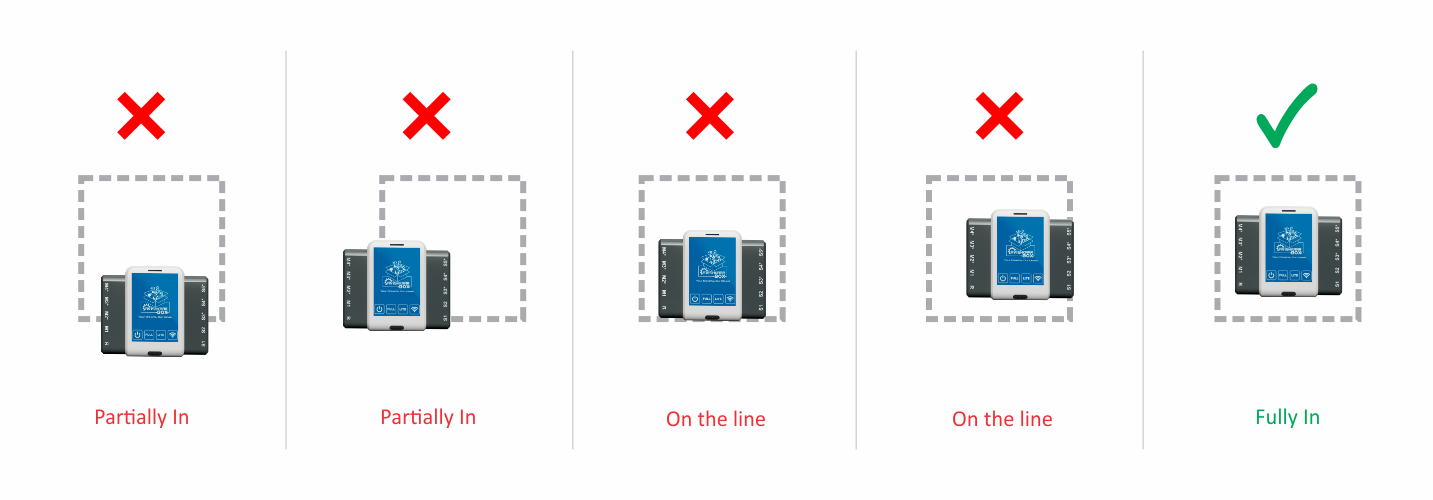
- Placement of props will only be considered when the prop is completely inside the designated area. Partially/On the line will not be considered.
- It is mandatory to mention Name and Number on your bots. (For example:Transporter-06)
Interpretation
- Problem statement text means exactly and only what it says, so take it literally.
- Do not interpret text based on your assumption about intent, or on how a situation might be in
real life
. - If a detail isn’t mentioned, then it doesn’t matter.
- There are no hidden requirements or restrictions. If you’ve read everything, then you know everything.
Examples
- If a task requirement is to collect the prop. That means the prop should be in control and attached with the robot.
- If a mission requirement is to place the prop at the designated location. It means the prop should be completely inside the designated area and detached from the robot. It will not be considered if it is partially inside or on the line or stays attached with the bot.
- You’re encouraged to learn the requirements and constraints very well, before realizing or exercising the freedoms.
Variability
As you build and program, keep in mind that our suppliers, mentors, and volunteers try very hard to make all arena and props as per the specifications mentioned, but you should always expect some variability (i.e. tolerance of 5%) due to machine/manual process and transportation. Consider this as a warning and incorporate them into your robot design. The variabilities can be defined as:
- Flaws in the arrangement of border walls.
- Variability in ambient light, at different times, locations and Arenas.
- Texture/bumps under the mat, due to imperfections, seams, or props.
- Presence or absence of tape at the edges of the Arena and Props.
- Waviness in the arena itself, as at many competitions, it’s impossible for the arena to be rolled out in time to lose their waviness. The Location and severity of waviness may vary.
- Two important building techniques you can use to limit the effects of variability are
- Use Caster wheels while building your Robot to avoid bumps in Arena.
- Cover your sensors from surrounding light.
NOTE: These are just suggestions and not binding and teams are encouraged to think through and design their own solution.
Explanation of the parts that can be used
Brains: Brains: There is no limitation on the number of brains used per robot. Choose from the Avishkaar-manufactured ones (Programmable) shown here.

E-Series Lite Brain

E-Series Full Brain
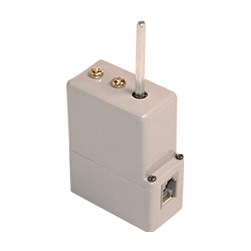
Sensors: You are allowed as many sensors as you like, but the types are limited to touch, infrared, color, sound, ultrasonic or temperature. Choose your favorite combination from among the Avishkaar-manufactured ones shown here. No other sensors are allowed.
IR Sensor

Ultrasonic Sensor

Color Sensor
Motors: Motors: There is no limitation on the number of motors used per robot. Choose among the Avishkaar-manufactured ones shown here. No other motors are allowed.
Geared Motor
Encoded Motor

Geared Motor
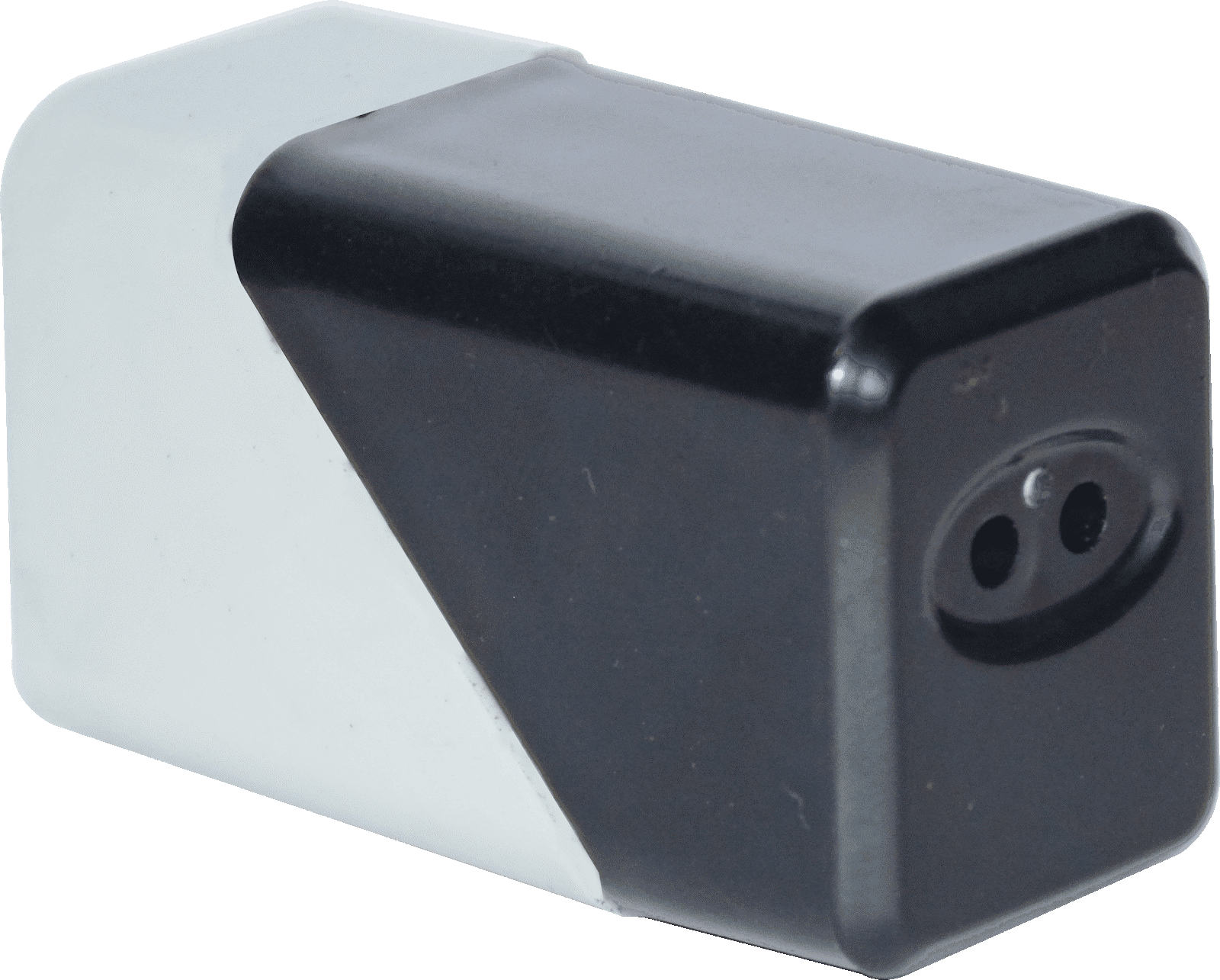
Reference for the placement of props/Robots
Verification of Robots
|
Note:The design shown in the image is a graphical image and no design reference must be drawn from this. For your design, please refer to the exact size details of the verification prop. Note: Bot should sit comfortably on the floor while verification. Any part of the bot in the air would be liable for rejection. |